















































Waveshare UGV Beast ROS 2 Open-Source KI-Roboter Raspberry Pi Inklusive
📦 Standort des Lagers: München, Deutschland
- Vorbestellung: Wenn ein Artikel nicht verfügbar ist, können Sie ihn vorbestellen. Wir versenden ihn, sobald der Bestand aufgefüllt ist, in der Regel innerhalb von 10 Werktagen. - Expressversand: Benötigen Sie es schneller? Kontaktieren Sie uns per E-Mail oder über unseren Live-Chat-Support, und wir arrangieren eine beschleunigte Lieferung für Sie.
Kostenloser Versand ab 50€ in Deutschland!
Waveshare UGV Beast ROS 2 Open-Source KI-Roboter Raspberry Pi Inklusive
Der UGV Beast ROS 2 Open-Source Offroad-Kettenroboter ist eine vielseitige Plattform mit Dual-Controllern, Computer-Vision-Fähigkeiten und einem komplett metallischen Gehäuse. Er ist für Flexibilität und Erweiterbarkeit ausgelegt und ideal für den Einsatz mit Raspberry Pi 4B und Raspberry Pi 5.
Empfehlung für Anfänger
Für Nutzer, die einen Raspberry Pi als Host-Controller verwenden möchten, empfehlen wir das UGV Rover PT PI5 ROS2 Kit. Wenn ein NVIDIA Jetson Orin Nano bevorzugt wird, empfehlen wir das UGV Rover PT Jetson Orin ROS2 Kit.
Beide Kits bieten außergewöhnliche Zuverlässigkeit, einen hochdrehmomentigen 2-Achsen Pan-Tilt, D500 Lidar und eine OAK-D Lite Tiefenkamera. Sie verfügen über umfassende Grundfunktionen und ROS2-Tutorials, die Anfängern ermöglichen, Robotikkenntnisse schnell zu erlernen und anzuwenden. Diese Robotik-Kits zeichnen sich durch hervorragende Erweiterbarkeit aus und ermöglichen vielfältige Anwendungsmöglichkeiten.
Einführung in die Produktmodellnamen
Unsere Produktmodellnamen sind so strukturiert, dass sie wichtige Merkmale vermitteln: Fahrwerkstyp, Pan-Tilt-Option, Host-Controller-Modell und Funktionstyp.
| Modellname | Beschreibung | Entsprechendes Modul | |
|---|---|---|---|
| Fahrgestelltyp | UGV Rover | 6-Rad 4WD Fahrwerk |  |
| UGV Beast | Unabhängiges Fahrwerk mit Offroad-Kettenlaufwerk |  |
|
| Pan-Tilt-Option | PT | mit 2-Achsen Pan-Tilt |  |
| Host-Controller | Jetson Orin | Verwendung von Jetson Orin Nano als Host-Controller. Hinweis: "Acce"-Kits enthalten keinen Host-Controller. |  |
| PI 5 | Verwendung von Raspberry Pi 5 als Host-Controller. Hinweis: "Acce" Kits enthalten keinen Host-Controller oder Kühlkörper. |  |
|
| PI 4B | Verwendung von Raspberry Pi 4B als Host-Controller. Hinweis: "Acce" Kits enthalten keinen Host-Controller oder Kühlkörper. |  |
|
| Acce | Kits mit "Acce" enthalten keinen Host-Controller, geeignet, wenn Sie bereits eine Host-Platine besitzen. | 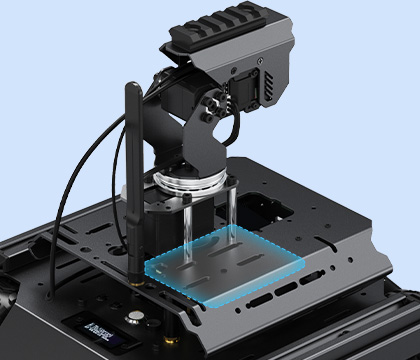 |
|
| Funktionstyp | AI Kit | Basis-AI-Kit mit einer 5MP Ultra-Weitwinkelkamera, beinhaltet Computer-Vision-Funktionalität und Tutorials. |  |
| ROS2 Kit | Erweitert das AI Kit mit einem D500 360° Lidar und OAK-D Lite Tiefenkamera und bietet vollständige ROS2-Funktionalität und Tutorials. |  |
|

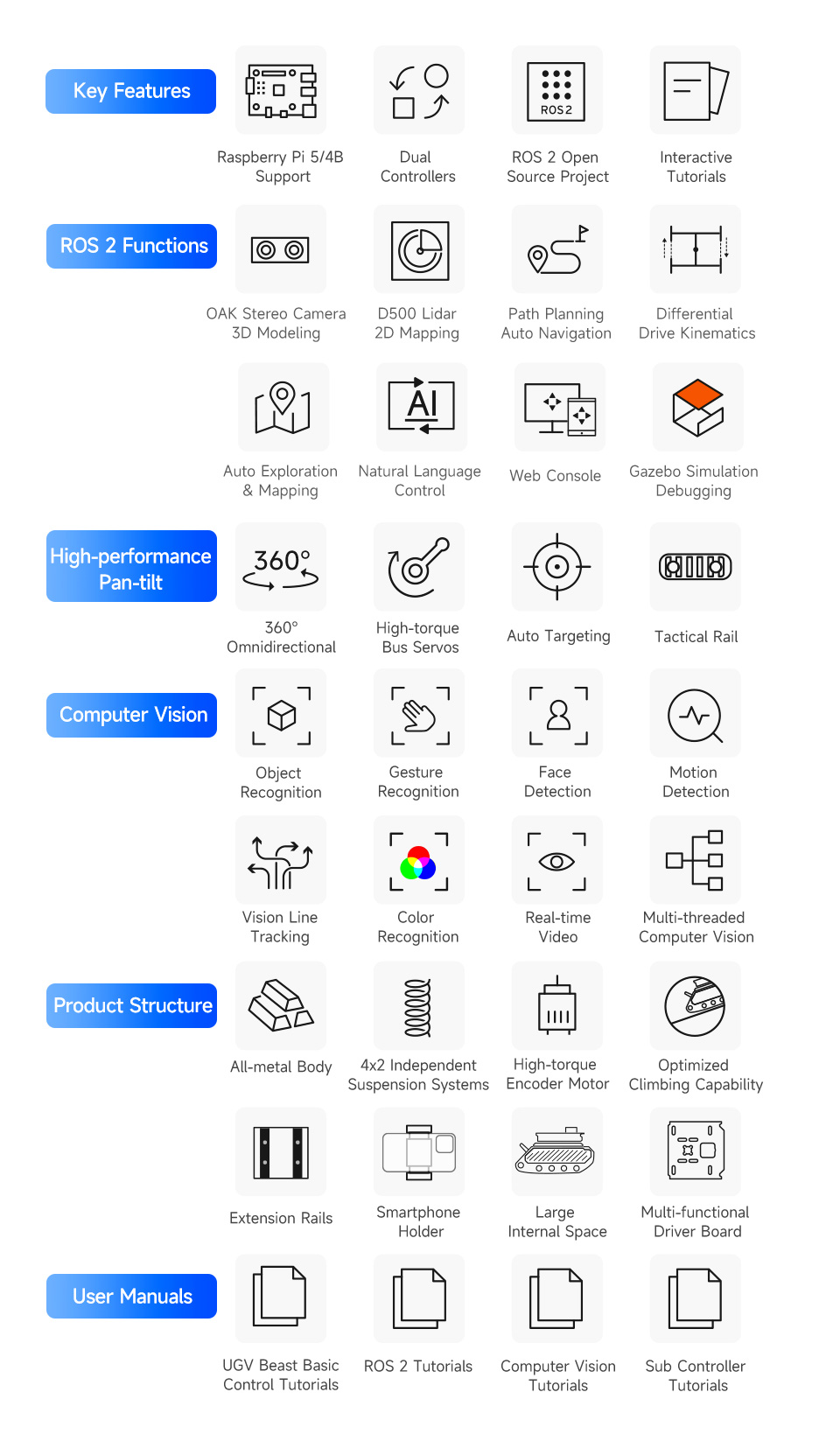
Funktionen auf einen Blick
Das UGV Beast ROS2 Kit ist ein AI-Roboter, der für Erkundung und Kreation entwickelt wurde. Mit außergewöhnlichem Erweiterungspotenzial, basierend auf ROS 2 und ausgestattet mit Lidar und einer Tiefenkamera, verbindet es nahtlos Ihre Vorstellungskraft mit der Realität. Es ist die ideale Wahl für Technikbegeisterte, Maker oder Programmieranfänger, die die Welt der intelligenten Technologie erkunden möchten.
Ausgestattet mit leistungsstarken Raspberry Pi Computern meistert der UGV Beast die Herausforderungen komplexer Strategien und Funktionen und inspiriert Ihre Kreativität. Sein Dual-Controller-Design kombiniert die hochentwickelten AI-Funktionen des Host-Controllers mit den hochfrequenten Basisoperationen des Sub-Controllers und sorgt so für präzise und reibungslose Leistung.
Die Steuerung erfolgt mühelos über die UGV Beast Webanwendung, es sind keine Software-Downloads erforderlich – öffnen Sie einfach Ihren Browser, um zu starten. Sie können grundlegende ROS 2-Funktionen nutzen, ohne eine virtuelle Maschine auf Ihrem PC zu benötigen. Mit Unterstützung für hochfrequente Echtzeit-Videoübertragung und mehrere AI Computer Vision-Funktionen ist der UGV Beast die ideale Plattform, um Ihre Ideen zum Leben zu erwecken!
Kit-Auswahl
Ein optionales Pan-Tilt-Modul (nur PT-Version) erweitert das Erweiterungspotenzial. Wählen Sie aus Host-Controller-Optionen wie Raspberry Pi 4B oder Raspberry Pi 5 oder wählen Sie die Acce-Version, wenn Sie bereits einen Pi besitzen. Alle Kits enthalten eine Kamera, Montagezubehör, eine TF-Karte und einen Kühlventilator.
| Modell | UGV Beast PT PI4B/PI5 ROS2 Kit | UGV Beast PT PI4B/PI5 ROS2 Kit Acce | UGV Beast PI4B/PI5 ROS2 Kit | UGV Beast PI4B/PI5 ROS2 Kit Acce |
|---|---|---|---|---|
 |
 |
 |
 |
|
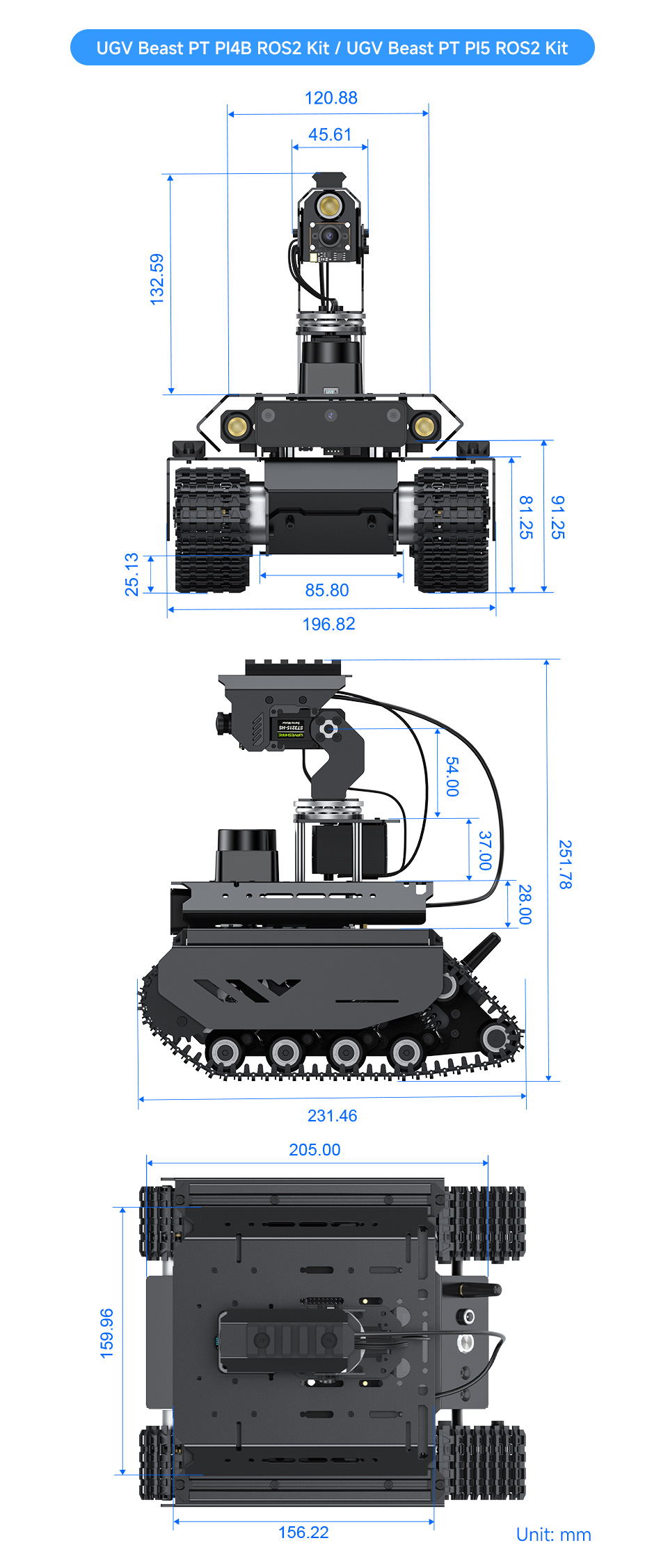
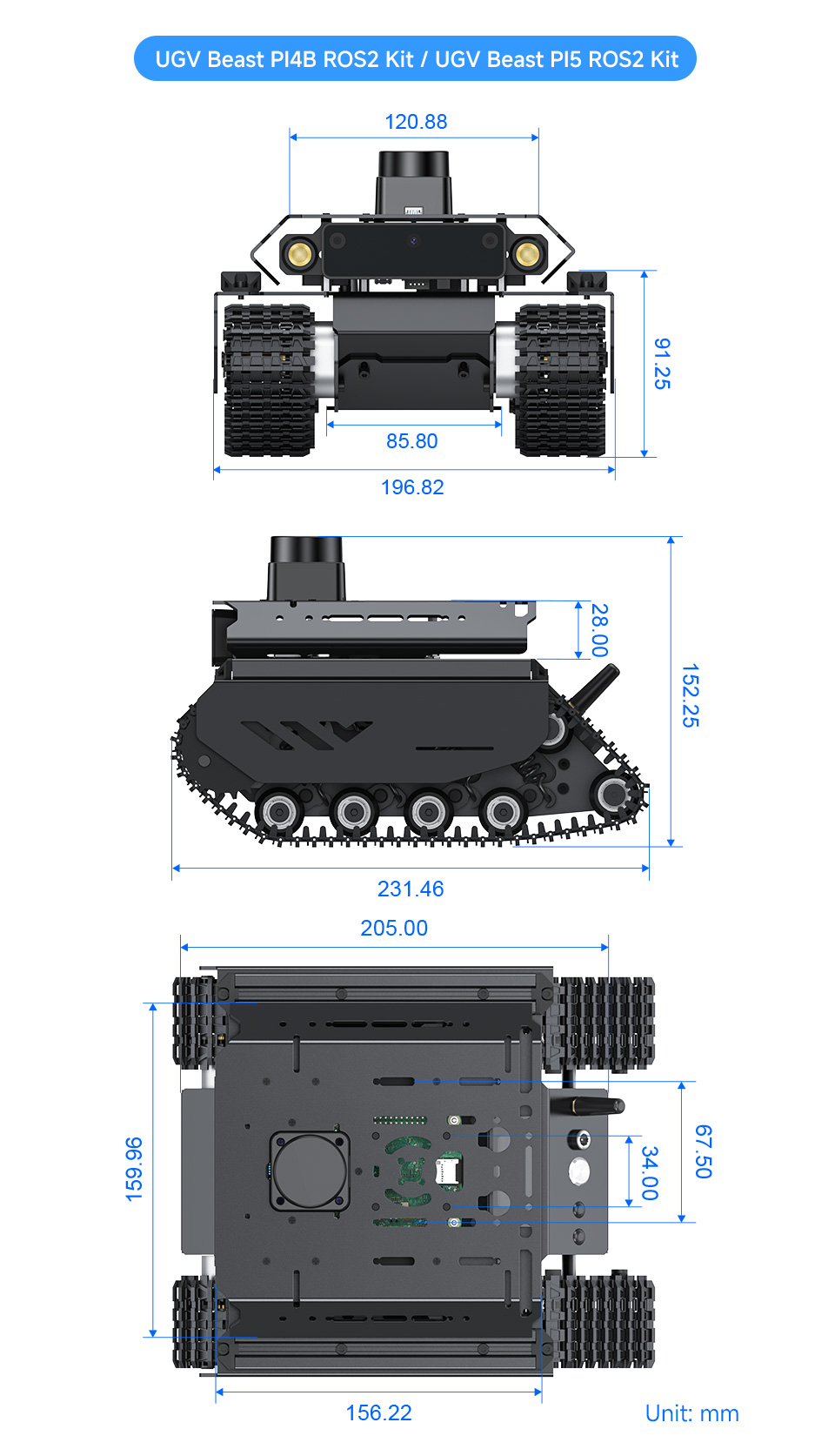
| Abmessung | 196.82×231.46×251.78mm | 196.82×231.46×152.25mm | ||
| Gewicht | 2411 ±5g | 2095 ±5g | ||
| Chassis-Höhe | 25mm | |||
| Pan-Tilt DOF | 2 | - | ||
| Pan-Tilt SERVO-DREHMOMENT | 30KG.CM | - | ||
| Pan-Tilt SERVO | ST3215 Servo | - | ||
| Host-Controller | RPi 4B 4GB / RPi 5 4GB | NICHT enthalten | RPi 4B 4GB / RPi 5 4GB | NICHT enthalten |
| Unterstützung des Host-Systems | Debian Bookwrom | |||
| ROS2-Version | ROS2-HUMBLE-LTS | |||
| Kamera-Sichtfeld | 160° | |||
| Stromversorgung | 3S UPS-Modul | |||
| Batterieunterstützung | 18650 Lithiumbatterie x 3 (NICHT enthalten) | |||
| Demo-Steuerungsmethoden | Webanwendung / Jupyter Lab interaktive Programmierung | |||
| Standard-Maximalgeschwindigkeit | 0,35m/s | |||
| Anzahl der Antriebsräder | 2 | |||
| Federungsmaterial | Edelstahl | |||
| Spurweite | 40mm | |||
| Minimaler Wendekreis | 0M (Drehung vor Ort) | |||
Basierend auf Raspberry Pi
Der UGV Beast unterstützt Raspberry Pi 5 und Raspberry Pi 4B und bietet leistungsstarke Rechenleistung, um komplexe Aufgaben zu bewältigen und mehr Möglichkeiten zu eröffnen.
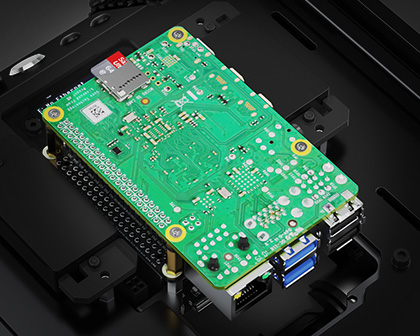
Verbindung mit Raspberry Pi 4B
Verbindung mit Raspberry Pi 5
Dual-Controller-Design für effiziente Zusammenarbeit und verbesserte Leistung
Der Host-Controller nutzt Raspberry Pi für KI-Vision und Strategieplanung, während der Sub-Controller ESP32 für Bewegungssteuerung und Sensordatenverarbeitung einsetzt, um nahtlose und präzise Abläufe zu gewährleisten.
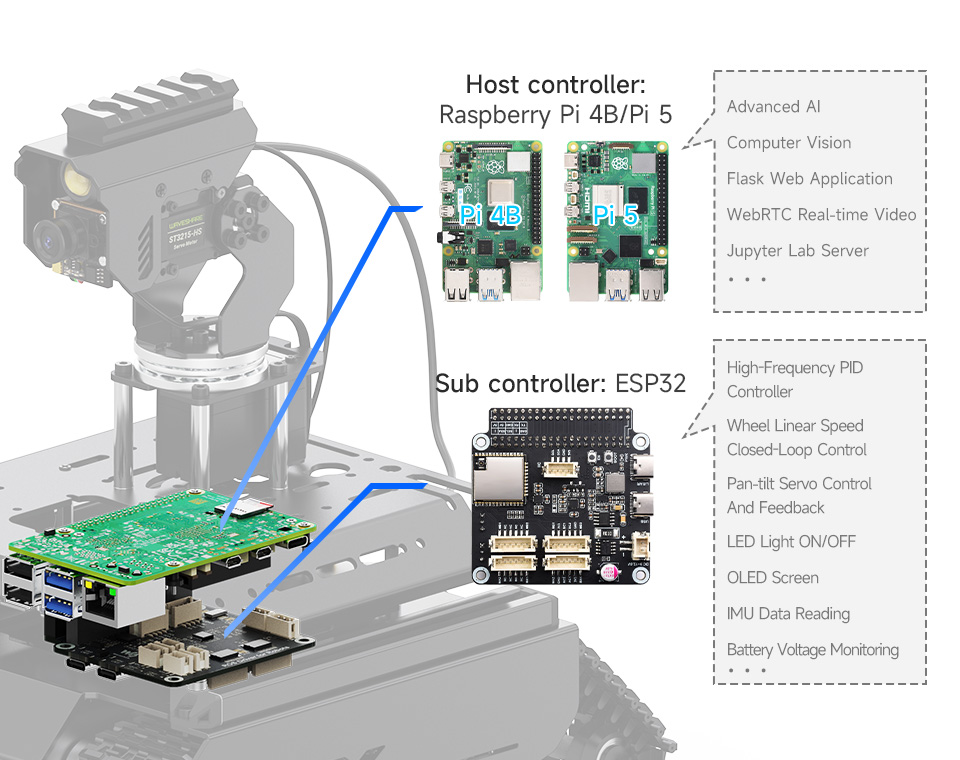
Raspberry Pi OS + ROS2 Docker
Diese Konfiguration gewährleistet fortschrittliche Entscheidungsleistung für den Roboter und hervorragende Systemkompatibilität. Sie unterstützt alle KI-Funktionen der vorherigen AI Kit Serienprodukte.

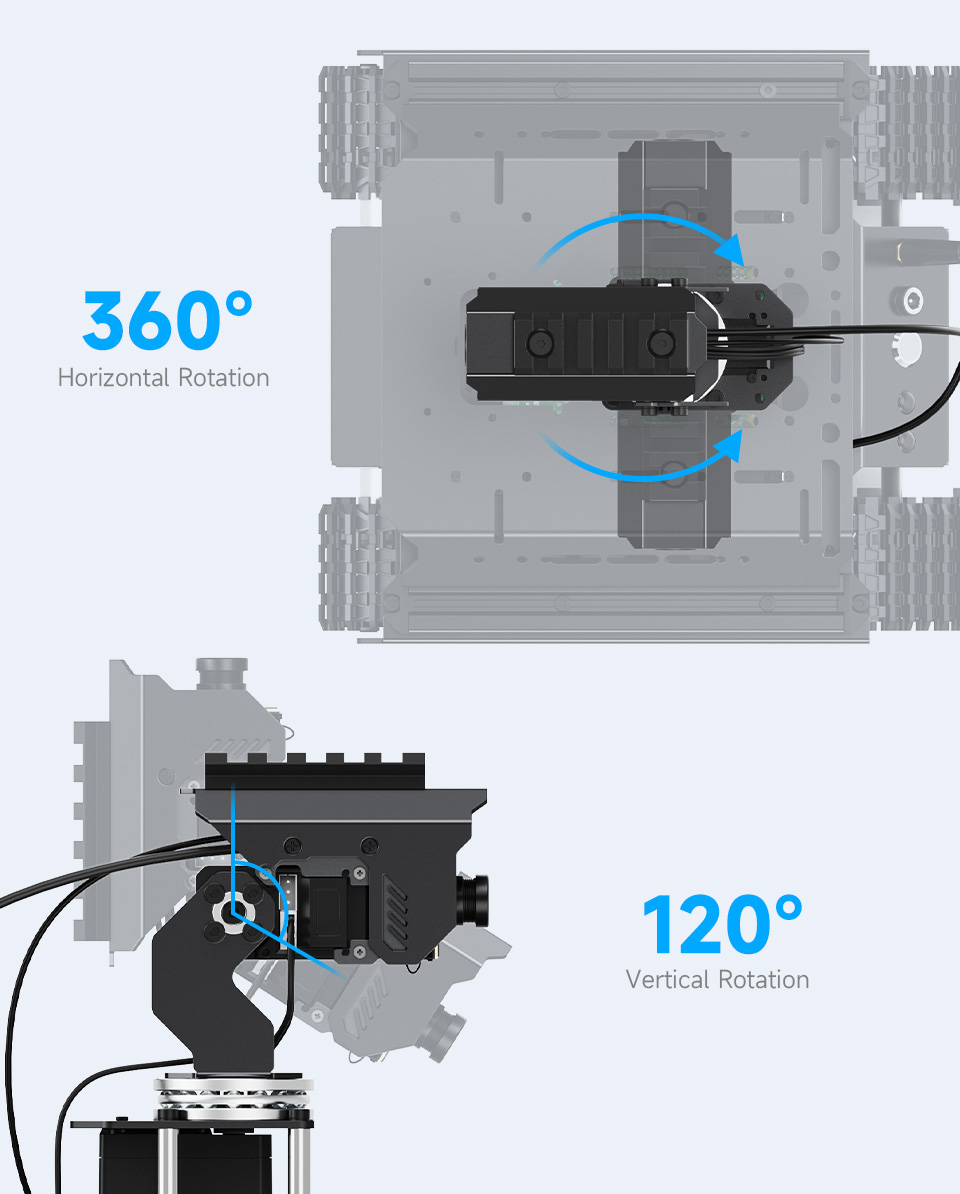
360° flexibler omnidirektionaler Pan-Tilt
Ausgestattet mit einer 5MP 160° Weitwinkelkamera erfasst das Pan-Tilt-Modul jedes Detail präzise.
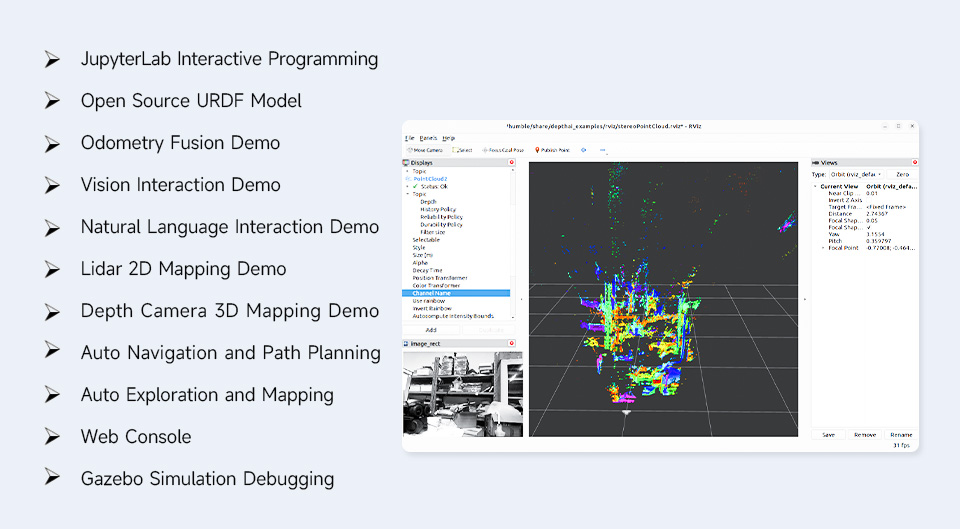
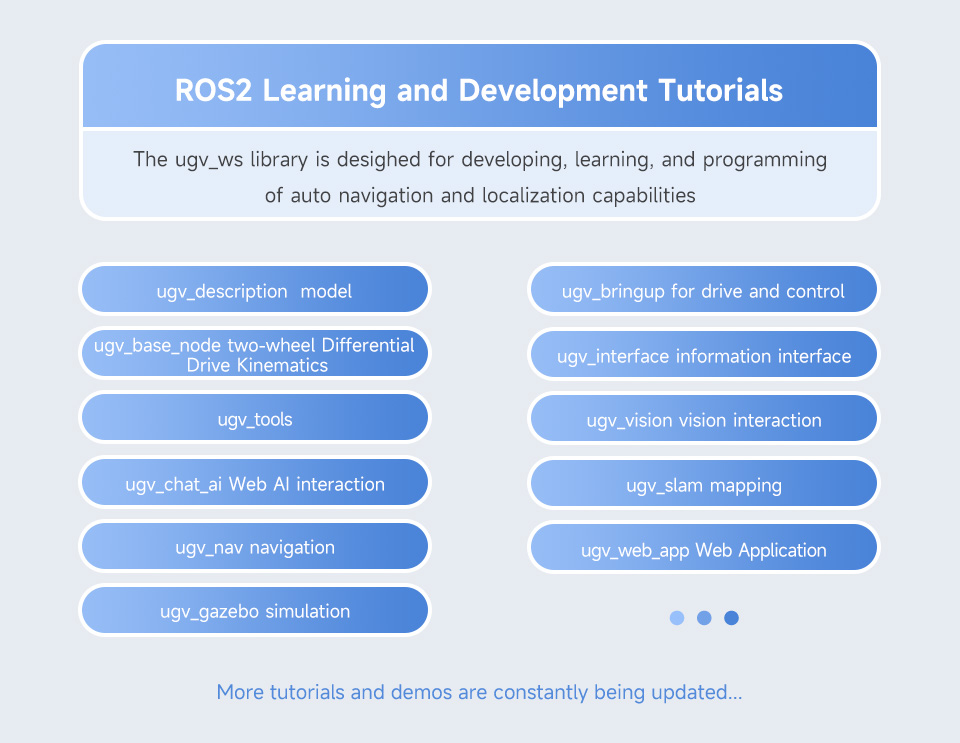
Open Source für alle ROS 2 Entwicklungsressourcen
Alle Demos für Host- und Sub-Controller sind Open Source, einschließlich der Roboterbeschreibungsdatei (URDF-Modell), Sensor-Datenverarbeitungsknoten für den Sub-Controller, kinematische Steuerungsalgorithmen und verschiedene Fernsteuerungsknoten.
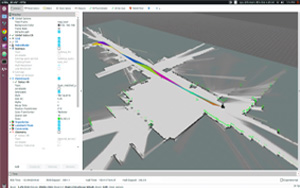
Integriert verschiedene ROS 2 Kartierungsmethoden
Der UGV Beast unterstützt verschiedene Kartierungsmethoden, um den Anforderungen unterschiedlicher Szenarien gerecht zu werden.

Gmapping 2D-Kartierung
Cartographer 2D-Kartierung
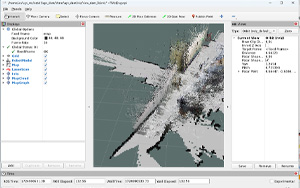
RTAB-Map 3D-Kartierung
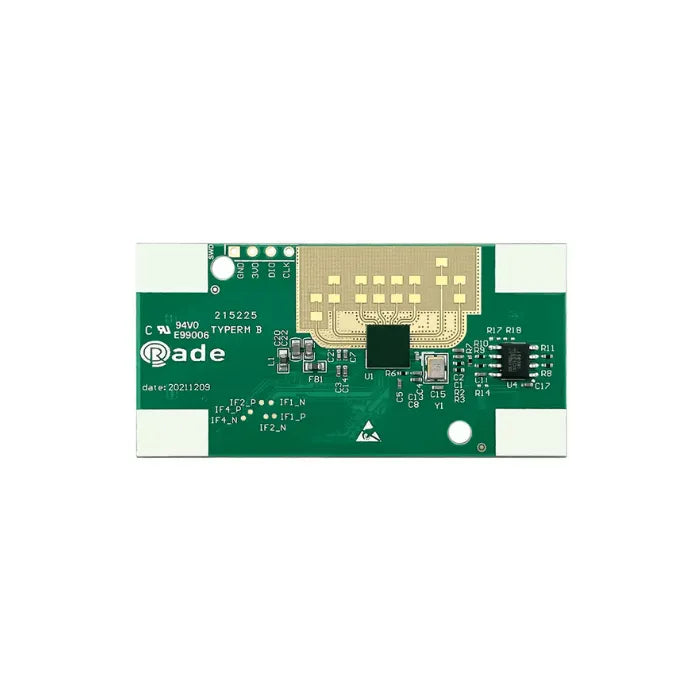
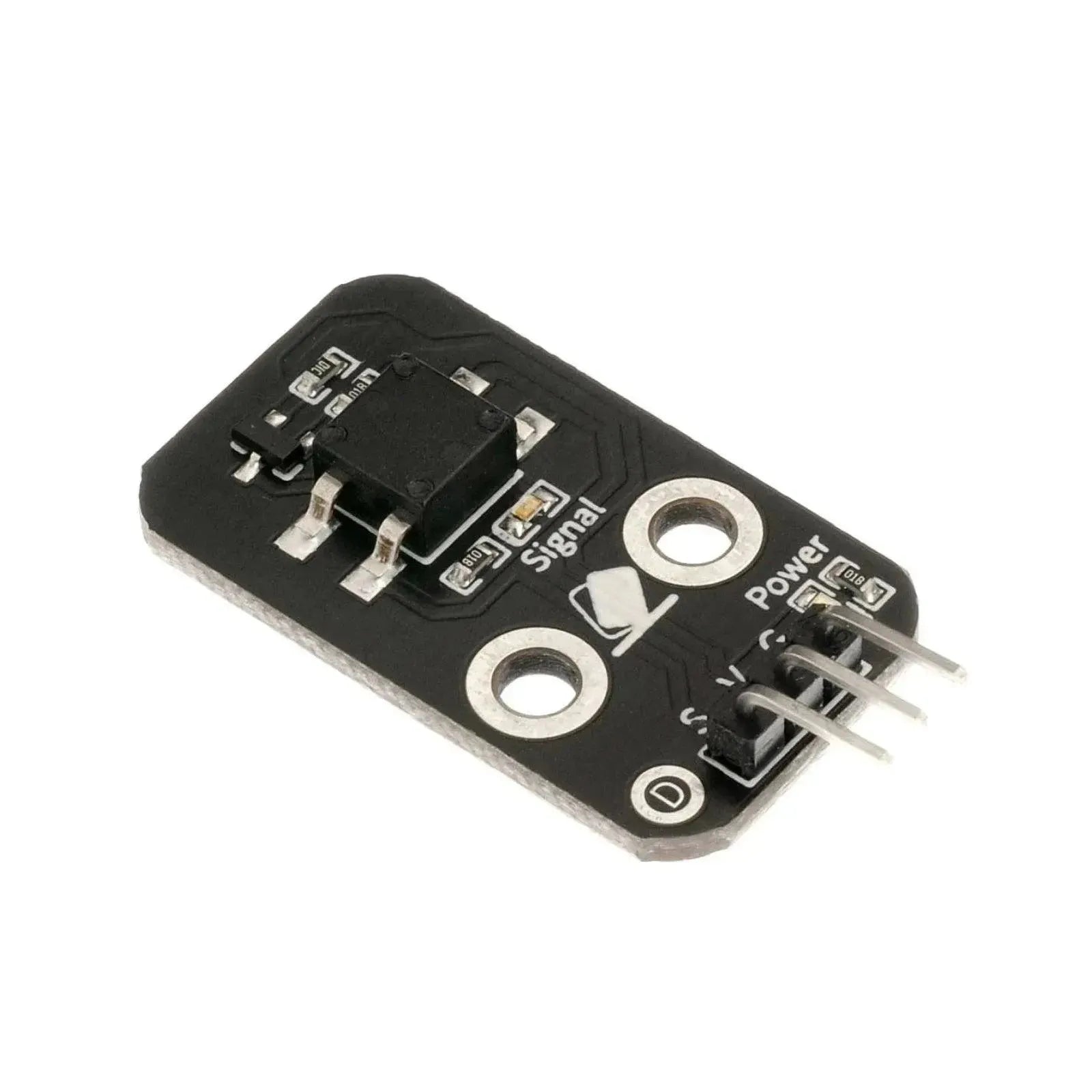
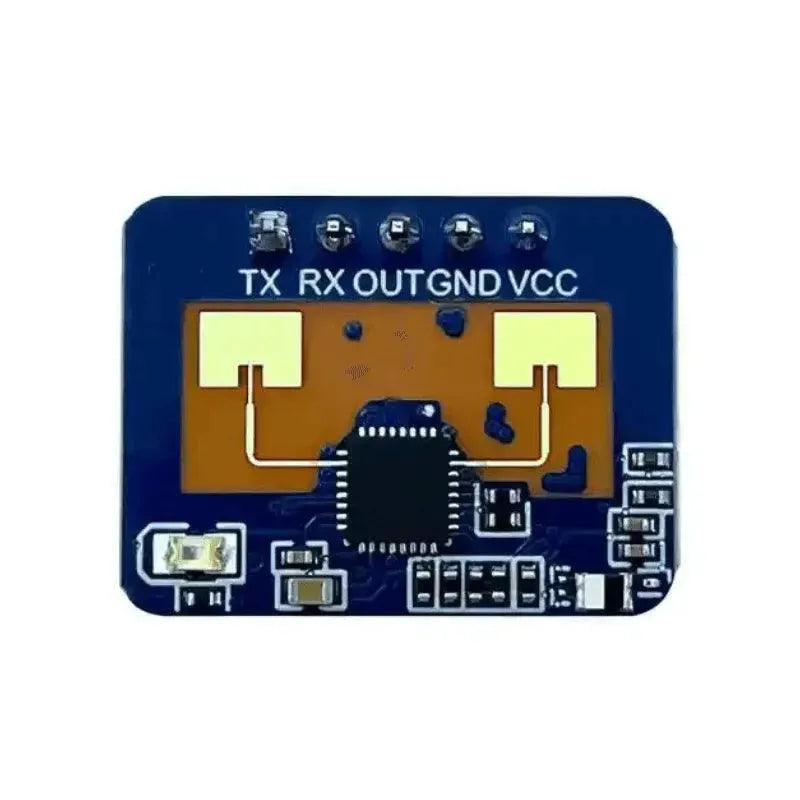
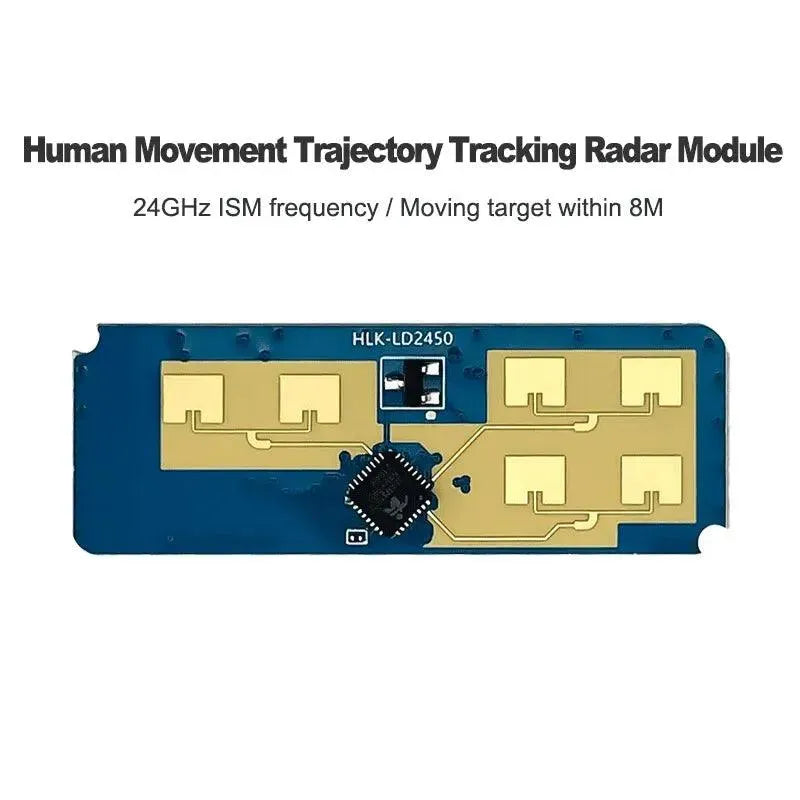
Mehrere kostengünstige Sensoren
Der Roboter integriert mehrere praktische und kostengünstige Sensoren für erweiterte Funktionalität.


Automatische Erkundung und Kartierung
Mit SLAM Toolbox führt der UGV Beast gleichzeitig Kartierung und Navigation in unbekannten Umgebungen durch, was die Aufgabenausführung vereinfacht. Dies ermöglicht dem Roboter, unbekannte Bereiche autonom zu erkunden und zu kartieren, ideal für unbemannte Anwendungen.
Unterstützt natürliche Sprachinteraktion
Durch die Nutzung der Large Language Model (LLM)-Technologie können Benutzer dem Roboter Befehle in natürlicher Sprache für Aufgaben wie Bewegung, Kartierung und Navigation erteilen.

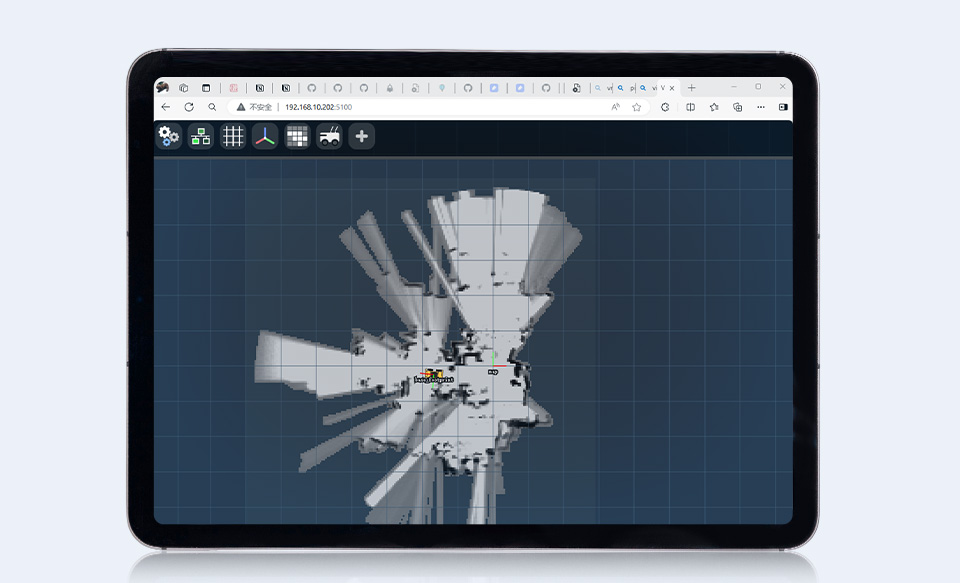
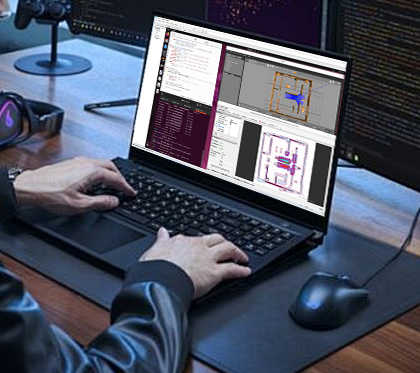
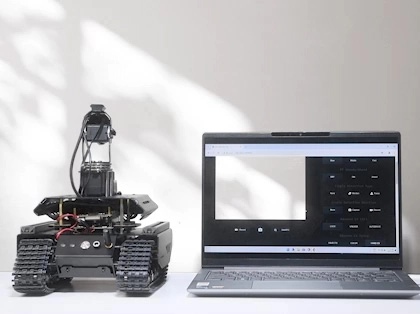
Bietet Web-Konsolentool
Greifen Sie direkt über einen Webbrowser auf grundlegende ROS 2-Funktionen zu, ohne eine PC-virtuelle Maschine zu benötigen. Diese plattformübergreifende Bedienung funktioniert auf Android- oder iOS-Tablets. Benutzer können einfach einen Browser öffnen, um den Roboter für Bewegung, Kartierung, Navigation und mehr zu steuern.
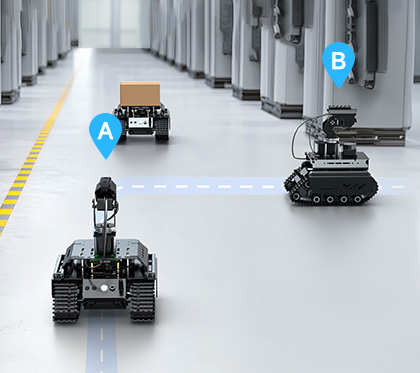
ROS2-Knoten Befehlsinteraktion
Benutzer können Steuerbefehle über Skripte an den Roboter senden, um Operationen wie Bewegung, Abruf des aktuellen Standorts und Navigation zu bestimmten Punkten durchzuführen, was die Sekundärentwicklung erleichtert.
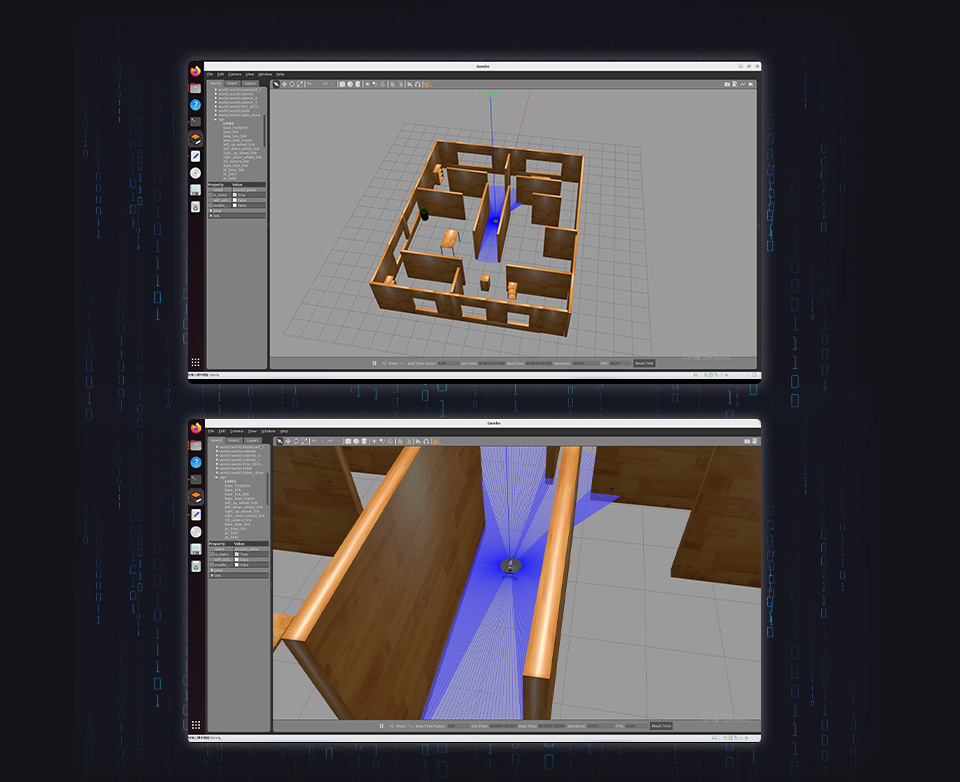
Gazebo-Simulations-Debugging
Der Gazebo-Roboter-Modus und eine vollständige Funktionsbibliothek werden für die Simulations-Debugging bereitgestellt, um die Systemverifikation und -prüfung in frühen Entwicklungsphasen zu unterstützen.
Das Abenteuer bei Einbruch der Nacht fortsetzen: Unterstützt taktische Erweiterungen
Ein hochhelles LED-Licht sorgt für klare Bilder bei schlechten Lichtverhältnissen.
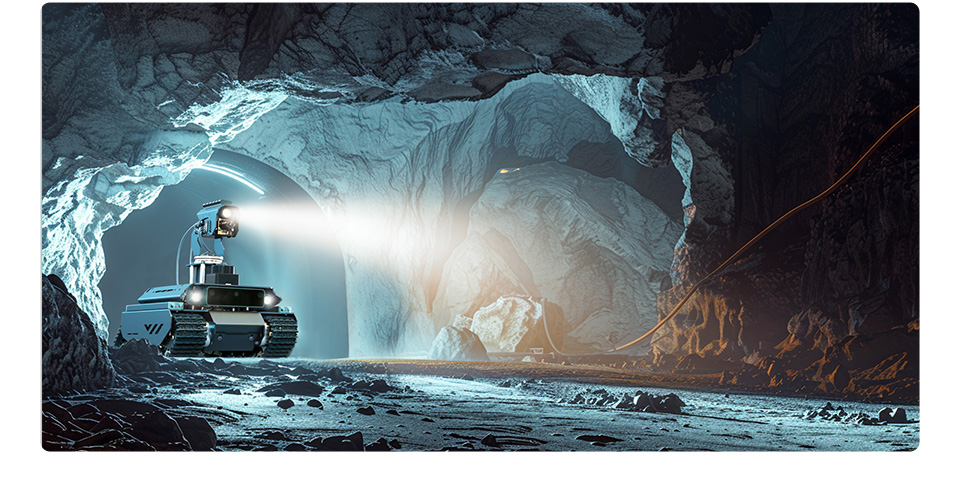
Er verfügt über eine 21 mm breite Schiene und einen 30KG.CM hochpräzisen & hochdrehmomentigen Bus-Servo für taktische Erweiterungen.

Hinweis: Im obigen Bild gezeigtes Zubehör dient nur als Referenz und ist NICHT enthalten.
Standard-Aluminiumschiene
Enthält 2 × 1020 Europäische Standard-Profil-Schienen, die die Installation zusätzlicher Peripheriegeräte über Bootsmuttern ermöglichen, um vielfältige Anforderungen zu erfüllen und spezielle Einsatzszenarien zu erweitern.

Hinweis: Nur die Schiene, Bootsmuttern und M4-Schrauben sind enthalten; andere Zubehörteile müssen separat erworben werden.
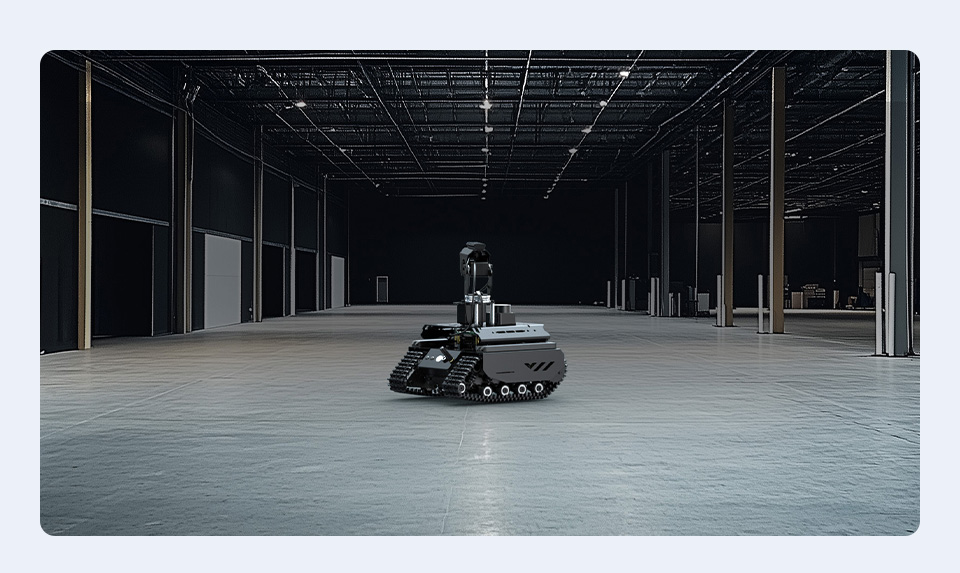
Unterstützt das Fahren in komplexem Gelände
Das Kettenfahrgestell des mobilen Roboters verfügt über unabhängige Federungssysteme, die stabilere Geländegängigkeit bieten.

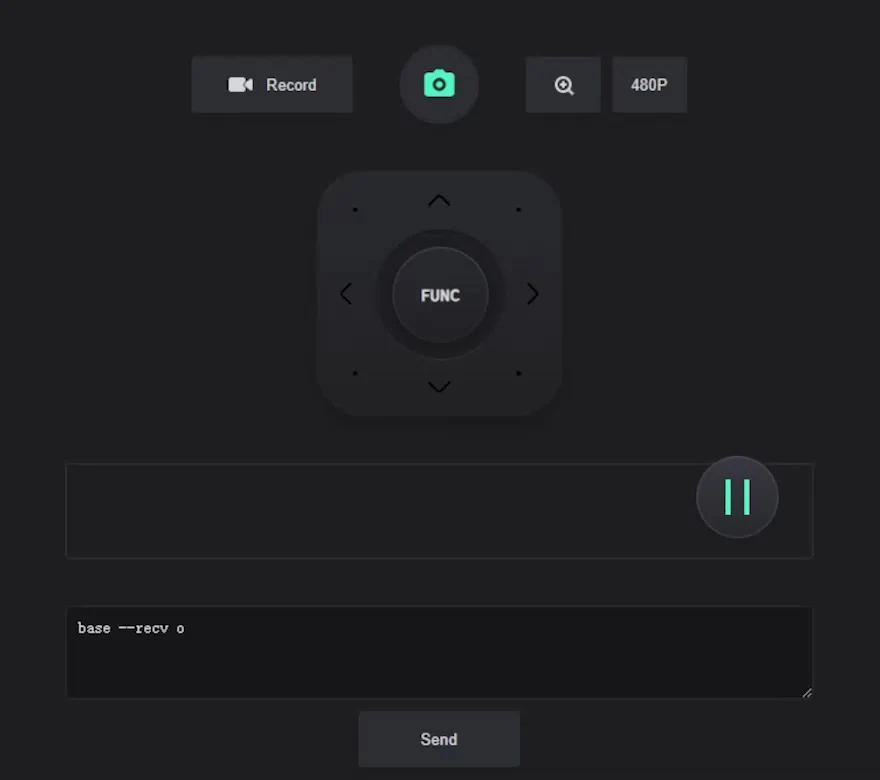
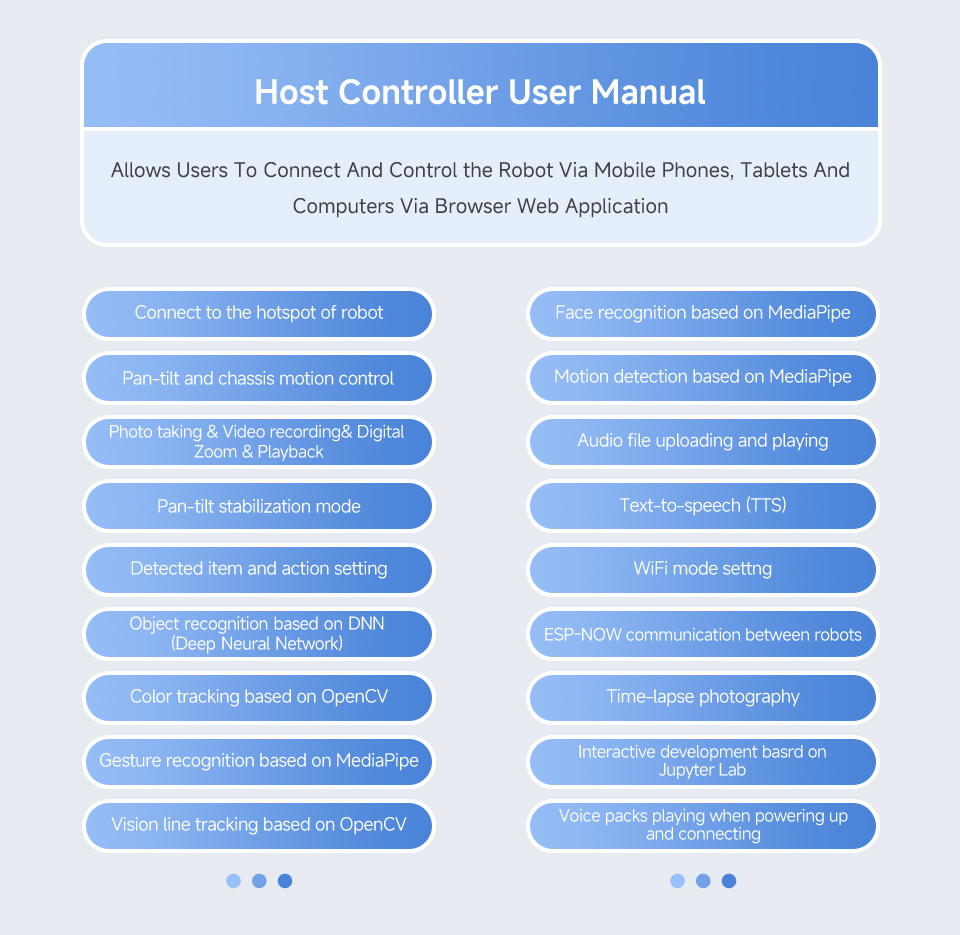
Einfache Steuerung über plattformübergreifende Webanwendung
Keine App-Installation erforderlich. Benutzer können den Roboter über Mobiltelefone, Tablets und Computer mit einem browserbasierten Web-App verbinden und steuern. Es unterstützt Shortcut-Tastensteuerung wie WASD und Maus-Eingabe über einen PC mit Tastatur.
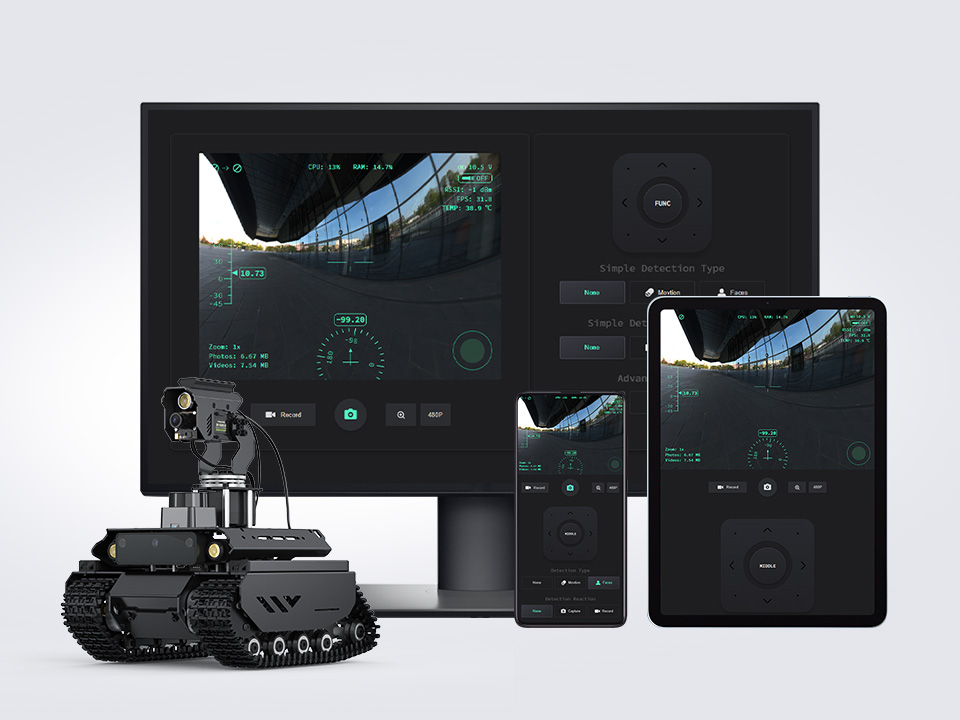
WebRTC Echtzeit-Videoübertragung
Verwendet eine Flask-Leichtgewicht-Webanwendung basierend auf WebRTC für ultra-niedrige Latenz Echtzeitübertragung. Geschrieben in Python, ist es einfach erweiterbar und arbeitet nahtlos mit OpenCV zusammen.

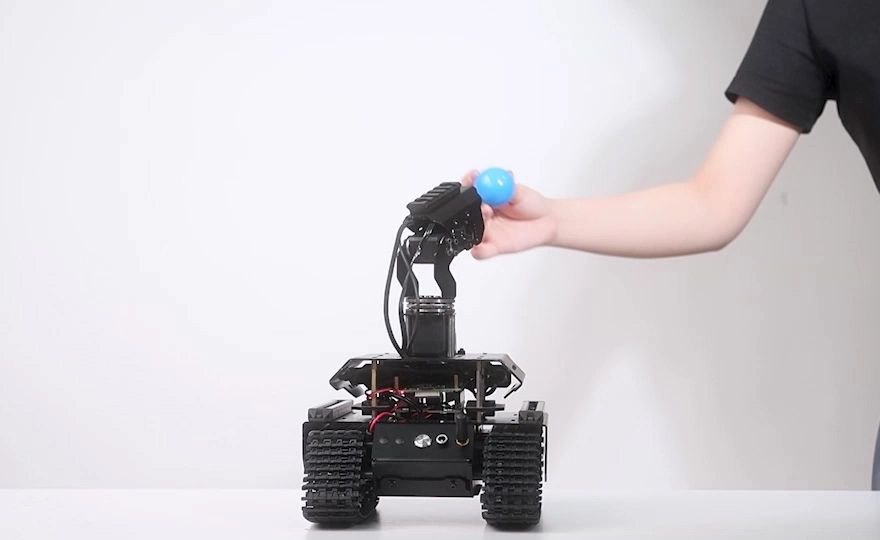
Erkennung, Verfolgung und Zielerfassung
Basierend auf OpenCV erreicht es Farberkennung und automatische Zielerfassung. Es unterstützt Ein-Knopf-Pan-Tilt-Steuerung und automatische LED-Beleuchtung, was die Erweiterung um weitere Funktionen ermöglicht.
Gesichtserkennung: Automatisches Aufnehmen von Bildern oder Videos
Basierend auf OpenCV führt es Gesichtserkennung durch und nimmt automatisch Fotos auf oder zeichnet Videos auf, wenn ein Gesicht erkannt wird.

Intelligente Objekterkennung
Der UGV Beast unterstützt die Erkennung vieler gängiger Objekte mit seinem Standardmodell.

Gestenerkennung: KI-Interaktion mit Körpersprache
Durch die Kombination von OpenCV und MediaPipe ermöglicht es die Gestensteuerung von Pan-Tilt und LED.
Gestensteuerung für Fotoaufnahmen

LED EIN/AUS und Hintergrundbeleuchtungssteuerung
Weitere MediaPipe-Demos zur einfachen Erstellung komplexer Videoverarbeitungsaufgaben
MediaPipe, ein Open-Source-Framework von Google, erleichtert den Aufbau plattformübergreifender Multimedia-Verarbeitungspipelines. Seine vorgefertigten Komponenten und leistungsstarken Fähigkeiten ermöglichen es dem Roboter, auf komplexe Multimediaeingaben wie Echtzeit-Videoanalysen zu reagieren und diese zu verarbeiten.

Gesichtserkennung

Lageerkennung
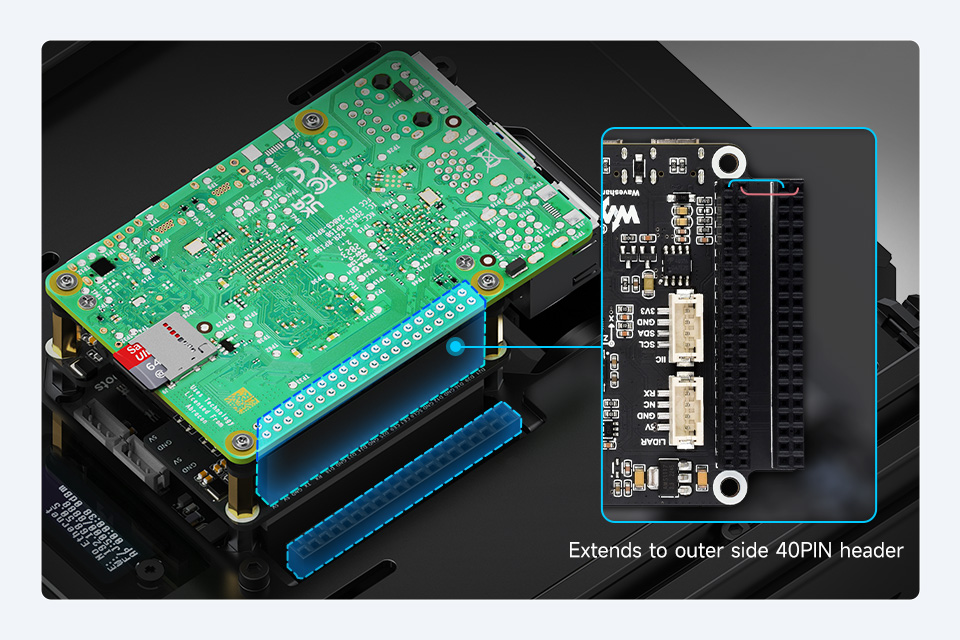
40PIN GPIO Erweiterter Header
Der Roboter verwendet nur die UART-Schnittstelle des Raspberry Pi GPIO für die Kommunikation. Der äußere 40PIN-Header der Treiberplatine steht zur Erweiterung weiterer Peripheriegeräte und Funktionen zur Verfügung.
Erhält Echtzeit-Informationsrückmeldung
Echtzeitüberwachung des Betriebszustands des Roboters ist verfügbar.

Webseiten-Kommandozeilen-Tool: Mehrere Funktionen für einfachere Erweiterung
Schnell einzurichten und einfach zu erweitern. Passen Sie Funktionen mühelos an und fügen Sie neue hinzu, ohne Frontend-Code zu ändern.
ESP-NOW kabellose Kommunikation zwischen Robotern
Basierend auf dem ESP-NOW-Kommunikationsprotokoll können mehrere Roboter kommunizieren, ohne IP- oder MAC-Adressen zu benötigen, was eine Zusammenarbeit mehrerer Geräte mit 100-Mikrosekunden-Latenz ermöglicht.

Gamepad-Steuerung für ein besseres Bedienerlebnis
Enthält ein kabelloses Gamepad für eine flexiblere Robotersteuerung. Schließen Sie den USB-Empfänger an Ihren PC an, um den Roboter über das Internet fernzusteuern. Eine Open-Source-Demo wird bereitgestellt, um Ihre Interaktionsmethoden anzupassen.

Unterstützt 4G/5G-Erweiterung
Unterstützt die Installation eines 4G/5G-Moduls für Anwendungsszenarien ohne WLAN-Zugang.
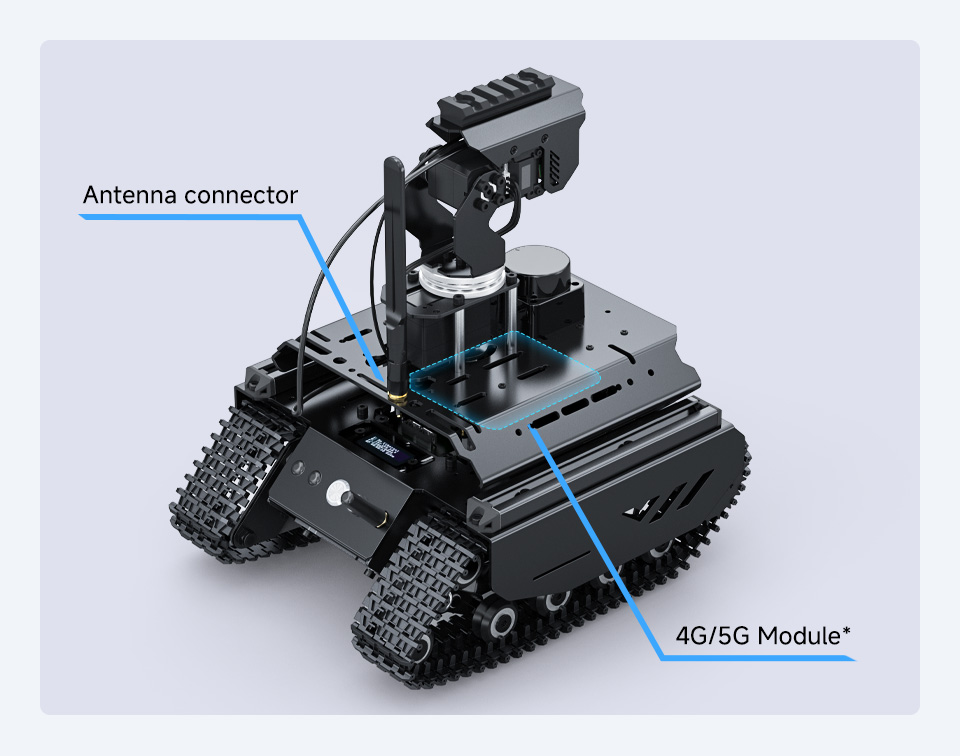
* Möglicherweise müssen Sie Tunneling-Dienste wie Ngrok, Cpolar oder LocalTunnel verwenden, um den lokalen Netzwerkdienst des Roboters (Flask-Anwendung) für die Fernsteuerung im Internet freizugeben.
Ermöglicht Fernsteuerung über das Internet
- Unsere Webanwendungs-Demos basieren auf WebRTC für die Echtzeit-Videoübertragung.
- WebRTC (Web Real-Time Communications) ermöglicht Webanwendungen, Peer-to-Peer-Verbindungen herzustellen und Audio/Video zu streamen oder Daten direkt zwischen Browsern auszutauschen.
- Wir bieten umfassende Ngrok-Tutorials, um Ihnen zu helfen, den Roboter schnell einzurichten und über das Internet fernzusteuern.

* Wir bieten nur Ngrok-Nutzungstutorials an; Ngrok-Konten oder -Server werden nicht bereitgestellt. Sie können unserem Tutorial folgen, um Ihren eigenen Ngrok-Dienst einzurichten oder bei Bedarf andere Tunneldienste wählen.
Unterstützt die Installation eines Smartphone-Halters
Wenn Sie ein Ersatz-Smartphone haben, können Sie es mit dem mitgelieferten Halter am Roboter befestigen. Verwenden Sie das Telefon, um einen Hotspot für den Roboter zu erstellen und so eine kostengünstige Fernsteuerung über das Internet zu ermöglichen.

* Wird mit einem Smartphone-Halter mit 1/4" Schraube im Paket geliefert.
Plattformübergreifendes interaktives Tutorial: Entwickeln während Sie lernen
Greifen Sie über Smartphones und Tablets auf Jupyter Lab zu, um Tutorials zu lesen und Code direkt auf der Webseite zu bearbeiten, was den Entwicklungsprozess vereinfacht.


Reiche Tutorial-Ressourcen
Wir bieten vollständige Tutorials und Demos, um Benutzern den schnellen Einstieg in das Lernen und die Sekundärentwicklung zu erleichtern.

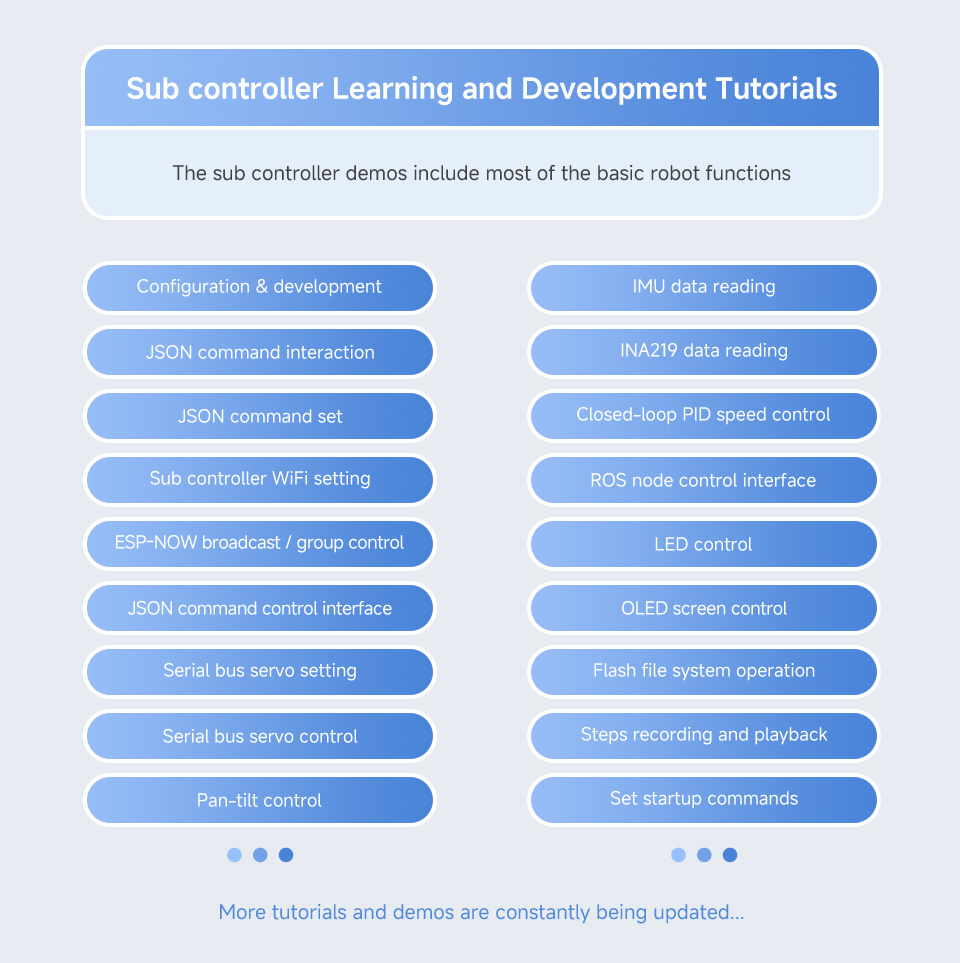
Open-Source Alle Demos: Vollständiger Dual-Controller-Technologiestack

Produktpräsentation

Abmessungen
1. Allgemeine Versandinformationen
- Wir bieten für jede Bestellung Premium-Versandmethoden mit einer Sendungsverfolgungsnummer an.
-
**Lieferadressen müssen in englischer Schreibweise eingegeben werden** und dürfen keine Sonderzeichen enthalten, damit das System des Kurierdienstes Ihre Adresse korrekt erkennen kann. Wir versenden streng nach der von Ihnen angegebenen Lieferadresse. Bitte teilen Sie uns Adressänderungen mit, bevor Ihre Bestellung als „Versendet“ markiert wird, um Paketverluste zu vermeiden.
-
Bitte kontaktieren Sie sofort unseren Kundenservice, wenn Sie eine Bestellung stornieren oder ändern müssen. Sobald Ihre Bestellung den Status „Versendet“ erreicht hat, kann sie nicht mehr storniert oder geändert werden. Um Komplikationen zu vermeiden, überprüfen Sie bitte Ihren Warenkorb vor der Kasse erneut.
-
Wir können alle lagernden Bestellungen innerhalb von **1 Werktag** nach Bestätigung Ihrer Bestellung versenden.
-
Alle Artikel werden vor dem Versand geprüft und sorgfältig von Hand verpackt.
-
Gemäß der üblichen Kurierpraxis müssen Sie den Inhalt des Pakets überprüfen, bevor Sie den Empfang der Ware unterschreiben. Andernfalls können wir nicht für Transportschäden haftbar gemacht werden, die nach der Annahme gemeldet werden.
🚀 Benötigen Sie einen schnelleren Versand?
Wenn Sie einen Expressversand benötigen, wenden Sie sich bitte an unser Kundensupport-Team unter info@openelab.io, um ein individuelles Angebot für Ihren Standort zu erhalten.
2. Versandtarife & Optionen (Deutschland)
Unsere Versandtarife berechnen sich nach Bestellwert und Zielort. Details entnehmen Sie bitte der untenstehenden Tabelle.
Wir versenden direkt aus unserem Lager in München (Garching).
| Versandart | Bestellwert | Kosten | Geschätzte Lieferzeit |
|---|---|---|---|
| Deutsche Post | €0 - €50.00 | €4.95 | 2-4 Werktage |
| Deutsche Post | Über €50.00 | Kostenlos | 2-4 Werktage |
|
DHL Paket (Schnellere Lieferung) |
€0 - €50.00 | €6.95 | 1-3 Werktage |
|
DHL Paket (Schnellere Lieferung) |
€50.00 - €100.00 | €2.00 | 1-3 Werktage |
|
DHL Paket (Schnellere Lieferung) |
Über €100.00 | Kostenlos | 1-3 Werktage |
|
DHL Express (Schnellste Lieferung) |
€0 - €50.00 | €20.00 | 1-2 Werktage |
|
DHL Express (Schnellste Lieferung) |
Über €50.00 | €15.00 | 1-2 Werktage |
Hinweis: OpenELAB.de versendet ausschließlich innerhalb Deutschlands. Kunden aus anderen Ländern nutzen bitte unseren globalen Shop: 👉 openelab.io.
Wichtiger Hinweis:
- Lagerstatus: Bitte überprüfen Sie den Lagerstatus auf der Produktseite. Unser System zeigt den Echtzeit-Bestand für unser Lager in München an. Wenn ein Artikel an diesem Standort nicht vorrätig ist, wird er als „Vorbestellung“ (Pre-order) gekennzeichnet. Sie können diese Artikel dennoch bestellen.
- Abwicklung von Vorbestellungen: Für „Pre-order“-Artikel organisieren wir die effizienteste Logistiklösung, um sicherzustellen, dass Sie Ihre Ware so schnell wie möglich erhalten. Ihr Paket kann direkt von unserem Lager in Shenzhen versendet werden. Alternativ transportieren wir die Ware im Rahmen unseres Standard-Nachschubprozesses zunächst in unser Lager in München (dauert in der Regel 5-10 Werktage), bevor wir sie an Sie versenden.
- Teillieferungen: Wenn Ihre Bestellung sowohl lagernde als auch vorbestellte Artikel enthält, priorisieren wir den sofortigen Versand der lagernden Artikel aus dem lokalen Lager. Die verbleibenden Vorbestellungen werden Ihnen in einer separaten Sendung zugestellt, sobald sie bereit sind.
3. Internationale Lager
Unsere Produkte lagern in unseren Lagern in München und Shenzhen, um flexible Logistiklösungen anzubieten. Auf jeder Produktbeschreibungsseite geben wir den spezifischen Lagerstandort an, damit Sie Ihren Kauf und die Lieferung besser planen können.

